
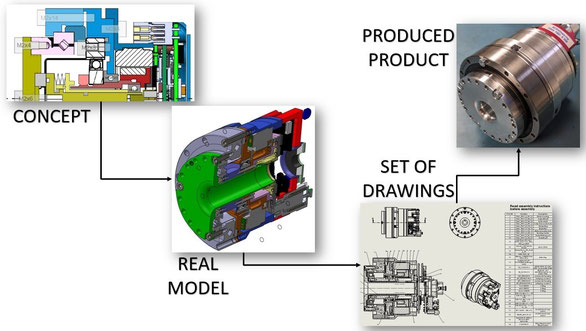
Drives for robots
Responsibility: design from a concept to models to set of drawings to the produced product.
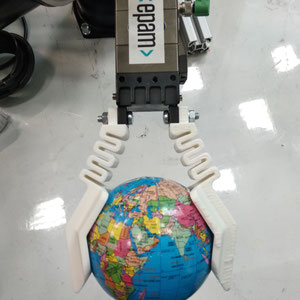
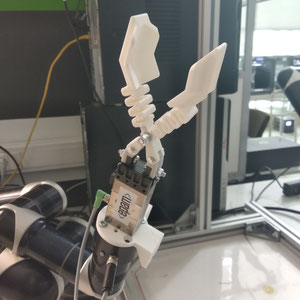
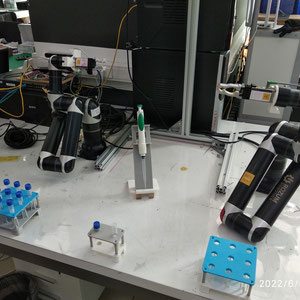
Customized grippers
Responsibility: design grippers for vary cases. Prototyping, testing.

Responsibility: design from a concept to models to set of drawings to the produced product.
Responsibility: design grippers for vary cases. Prototyping, testing.